
Yapay zeka son yıllarda dikkat çekici ilerlemeler kaydetti. Büyük dil modelleri soruları yanıtlayabiliyor, kod üretebiliyor, makaleler yazabiliyor ve karmaşık sohbetler gerçekleştirebiliyor. Ancak günümüzdeki yapay zeka sistemlerinin çoğu hâlâ tamamen dijital dünyada varlığını sürdürüyor; bilgileri işliyor, çıktılar üretiyor ve yalnızca ekranlar ile ağlar üzerinden etkileşim kuruyor.
Fiziksel Yapay Zeka (Physical AI), bu gelişimin bir sonraki aşamasını temsil ediyor. Sadece dijital verileri işlemek yerine, makinelerin fiziksel dünyayı algılamasını, anlamasını ve onunla etkileşim kurmasını sağlıyor. Robotların, otonom araçların, dronların ve akıllı makinelerin gerçek dünyadaki görevleri otonom olarak yerine getirmesine olanak tanıyan zeka katmanını oluşturuyor.
Dijital Zekadan Fiziksel Zekaya
Geleneksel dijital yapay zeka sistemleri sanal ortamlarda çalışır. Bir sohbet botu soruları yanıtlayabilir, ancak bir kutuyu yerden kaldıramaz. Bir görüntü oluşturma modeli gerçekçi resimler üretebilir, ancak kalabalık bir depoda yolunu bulamaz.
Geleneksel robotik sistemler büyük ölçüde katı ve kural tabanlı programlamaya dayanır ve bu yaklaşım, öngörülemeyen ortamlarda çoğu zaman yetersiz kalır. Fiziksel Yapay Zeka, modern yapay zekayı sensörlere, aktüatörlere ve mekanik kontrol sistemlerine entegre ederek bu boşluğu dolduruyor. Bu sistemler yalnızca verileri işlemekle kalmıyor; çevrelerini gözlemliyor, gerçek zamanlı kararlar alıyor ve fiziksel eylemleri güvenli bir şekilde gerçekleştiriyor.
- Dijital Yapay Zeka bilgiyi anlar ve işler.
- Fiziksel Yapay Zeka ise fiziksel dünyada algılar, muhakeme eder ve harekete geçer.
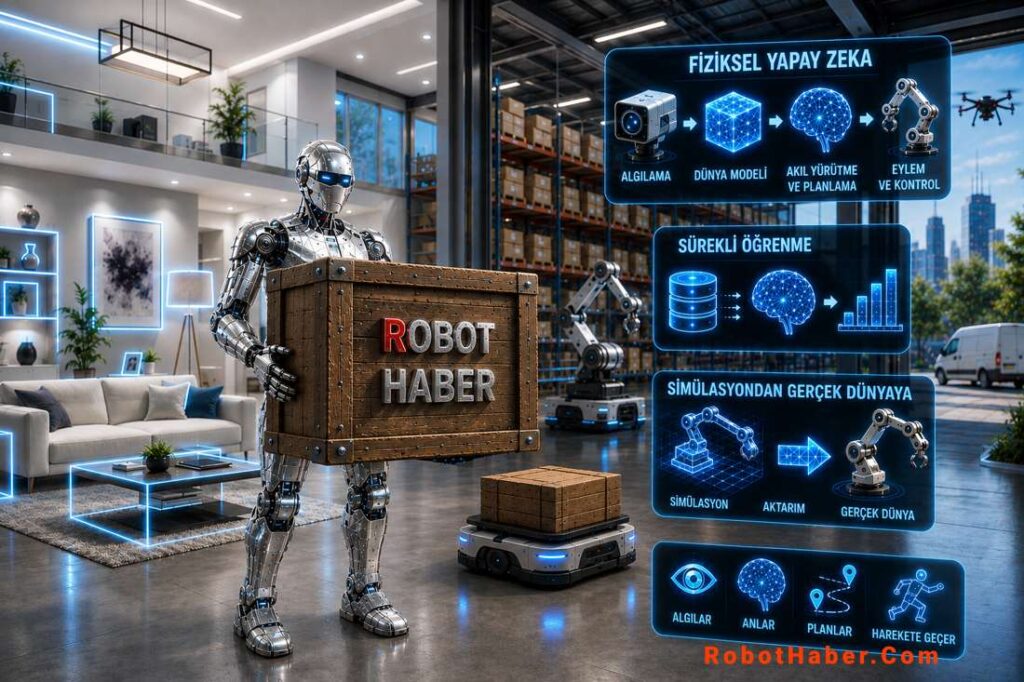
Fiziksel Yapay Zekanın Temel Bileşenleri
Fiziksel Yapay Zeka sistemlerinin sorunsuz çalışabilmesi için birbiriyle bağlantılı çeşitli teknolojik katmanlar gerekir.
Algılama (Perception)
Bir robot öncelikle çevresinden veri toplamalıdır. Bunun için çeşitli gelişmiş sensörlerden yararlanır:
Mekânsal Algılama ve Navigasyon
- Kameralar
- LiDAR
- Radar
Kinematik ve Kuvvet Ölçümü
- IMU’lar (Ataletsel Ölçüm Birimleri – Inertial Measurement Units)
- Kuvvet sensörleri
- Tork sensörleri
Bu çoklu sensör verileri sayesinde sistem; engelleri algılayabilir, insanları tanıyabilir, mesafeleri tahmin edebilir ve çevredeki değişiklikleri takip edebilir.
Dünya Modellemesi (World Modeling)
Ham sensör verileri tek başına yeterli değildir. Fiziksel Yapay Zeka sistemleri, çevrenin dinamik bir iç temsilini oluşturmak zorundadır.
Genellikle dünya modeli (world model) olarak adlandırılan bu yapı, robotun şu temel sorulara cevap vermesine yardımcı olur:
- Neredeyim?
- Etrafımda hangi nesneler var?
- Neler hareket ediyor?
- Bir sonraki anda ne olabilir?
Dünya modelleri, akıllı karar verme süreçlerinin temelini oluşturan öngörü yeteneğini sağlar.
Muhakeme ve Planlama (Reasoning and Planning)
Çevre anlaşıldıktan sonra sistem olası eylemleri değerlendirir ve hedefe ulaşmak için en güvenli ve verimli yolu seçer.
Örneğin bir depo robotunun, bir paketi belirli bir noktaya taşırken hareket hâlindeki forkliftlerin etrafından güvenli şekilde geçmesi gerekebilir.
Modern Fiziksel Yapay Zeka sistemleri giderek daha fazla uçtan uca öğrenme (end-to-end learning) yaklaşımlarını kullanmaktadır. Bu yöntemlerde sinir ağları algılamadan eyleme kadar olan süreci doğrudan birbirine bağlayabilir. Bununla birlikte, birçok ticari sistem hâlâ öğrenilmiş modelleri geleneksel planlama ve kontrol algoritmalarıyla birleştirerek güvenilirliği ve güvenliği artırmaktadır.
Eylem ve Kontrol (Action and Control)
Bir karar verildikten sonra kontrol sistemleri yüksek seviyeli hedefleri hassas mekanik hareketlere dönüştürür. Motorlar ve aktüatörler koordine edilerek hareketlerin doğru şekilde gerçekleştirilmesi sağlanır.
İnsansı robotlarda bu süreç çok daha karmaşıktır. Robotun dengesini koruması, onlarca eklemi aynı anda koordine etmesi ve kuvvetleri sürekli olarak gerçek zamanlı ayarlaması gerekir.
Öğrenme (Learning)
Fiziksel Yapay Zeka sistemleri deneyim kazandıkça davranışlarını geliştirir.
Makine öğrenmesi ve pekiştirmeli öğrenme (reinforcement learning) teknikleri sayesinde robotlar değişen koşullara uyum sağlayabilir, performanslarını artırabilir ve zamanla daha verimli hâle gelebilir.
Bir görevi tekrar tekrar gerçekleştiren robot, zamanla aynı işi daha hızlı, daha güvenli veya daha az enerji tüketerek yapmanın yollarını keşfedebilir.
Fiziksel Yapay Zeka Neden Sohbet Botlarından Daha Zordur?
Fiziksel dünyada çalışmak, dijital yapay zekanın karşılaşmadığı birçok zorluğu beraberinde getirir.
Bir sohbet botu yanlış cevap verdiğinde sonuç genellikle yanlış bilgi sunulmasıdır. Ancak bir robot hata yaptığında ekipmanlara zarar verebilir, operasyonları aksatabilir veya çevresindeki insanların güvenliğini tehlikeye atabilir.
Bu nedenle Fiziksel Yapay Zeka sistemleri aşağıdaki konularla güvenilir şekilde başa çıkmak zorundadır:
- Belirsizlikler ve sıra dışı durumlar (edge cases)
- Gerçek zamanlı karar verme
- Güvenlik gereksinimleri
- Donanım kısıtlamaları
- Dinamik ortamlar
Robotlar kaygan zeminler, değişen ışık koşulları, beklenmeyen engeller, sensör gürültüsü ve hareket eden insanlar gibi birçok değişkenle mücadele etmek zorundadır.
Bu nedenle Fiziksel Yapay Zeka; yazılım zekası, sensör sistemleri, kontrol algoritmaları ve mekanik mühendisliğin sıkı entegrasyonunu gerektirir.
Simülasyonun Rolü ve Sim-to-Real Problemi
Robotları doğrudan fiziksel dünyada eğitmek çoğu zaman yavaş, maliyetli ve donanım açısından risklidir.
Bu nedenle geliştiriciler giderek daha fazla gelişmiş simülasyon platformlarına yönelmektedir. Bu sanal ortamlarda robotlar, gerçek dünyaya çıkmadan önce milyonlarca etkileşim gerçekleştirebilir.
En bilinen örneklerden biri NVIDIA’nın Fiziksel Yapay Zeka ekosistemidir. Bu ekosistem içinde yer alan NVIDIA Omniverse ve Isaac Sim, geliştiricilerin dijital ikizler (digital twins) oluşturmasına, sentetik eğitim verileri üretmesine ve robotları son derece gerçekçi sanal ortamlarda test etmesine olanak tanır.
Ancak simülasyon çözümün yalnızca bir parçasıdır.
Mühendislerin aynı zamanda sim-to-real boşluğu (sim-to-real gap) olarak bilinen sorunu da aşması gerekir. Simülasyonda kusursuz çalışan bir robot, gerçek dünyada beklenmedik ışık koşulları, sensör hataları, donanım aşınmaları veya çevresel farklılıklarla karşılaşabilir.
Bu boşluğu azaltmak için araştırmacılar:
- Domain randomization
- Sentetik veri üretimi
- Büyük ölçekli pekiştirmeli öğrenme
gibi tekniklerden yararlanmaktadır.
Fiziksel Yapay Zeka ve İnsansı Robotlar
İnsansı robotlar, Fiziksel Yapay Zekanın en iddialı uygulamalarından biridir.
Kontrollü ve yapılandırılmış ortamlarda çalışan endüstriyel robot kollarının aksine, insansı robotların insanlar için tasarlanmış alanlarda görev yapması beklenir. Yürümeleri, merdiven çıkmaları, araç kullanmaları, engellerden kaçınmaları, nesneleri yeterli bir beceri ve hızda elleri ile hareket ettirebilmeleri ve insanlarla güvenli şekilde etkileşim kurmaları gerekir.
Bu görevleri gerçekleştirebilmek için şu teknolojileri bir araya getirirler:
- Gelişmiş algılama sistemleri
- Dünya modelleri
- Hareket planlama sistemleri
- Tüm vücut kontrolü (whole-body control)
- Makine öğrenmesi
Birçok robotik şirketi için Fiziksel Yapay Zeka yalnızca bir özellik değil, genel amaçlı robot yeteneklerine ulaşmanın temel mimarisidir.
Vision-Language-Action (VLA) Modellerinin Yükselişi
Fiziksel Yapay Zeka alanındaki en umut verici gelişmelerden biri Vision-Language-Action (VLA) modellerinin ortaya çıkmasıdır. Not: Bu terim Türkçe’de yaygın olarak VLA şeklinde geçmekle beraber ”Görü-Dil-Eylem Modelleri” şeklinde de kullanılabilir.
Bu mimariler üç kritik alanı bir araya getirir:
- Görme (Vision): Çevreyi anlamak için
- Dil (Language): İnsan talimatlarını yorumlamak için
- Eylem (Action): Fiziksel sistemleri kontrol etmek için
VLA destekli bir robot şu komutu anlayabilir:
“Tahta kutuyu al ve üst rafa yerleştir.”
Model, komutu yorumlar, doğru nesneyi belirler, gerekli hareket planını oluşturur ve görevi yerine getirir.
Bu yaklaşım, katı programlama yöntemlerinden uzaklaşıp çok çeşitli görevleri minimum görev özelinde kodlama ile gerçekleştirebilen uyarlanabilir makinelere doğru önemli bir dönüşümü temsil etmektedir.
Fiziksel Yapay Zekanın Geleceği
Birçok araştırmacı ve sektör lideri, Fiziksel Yapay Zekanın önümüzdeki on yılın belirleyici teknolojilerinden biri olabileceğine inanıyor.
Yapay zeka modelleri, yüksek doğruluklu simülasyon ortamları, işlem donanımları ve sensör teknolojileri gelişmeye devam ettikçe Fiziksel Yapay Zeka sistemlerinin daha yetenekli ve daha otonom hâle gelmesi bekleniyor. NVIDIA’nın robotik odaklı Isaac ve GR00T girişimleri de genel amaçlı robot zekası geliştirme yönündeki endüstri çabalarının önemli örnekleri arasında yer alıyor.
Potansiyel uygulama alanları oldukça geniş:
- Üretim
- Depolama ve lojistik merkezleri
- İnşaat
- Tarım
- Sağlık hizmetleri
- Lojistik
- Ev içi yardım sistemleri
- Otonom ulaşım
- Uzay ve derin deniz keşifleri
Dijital zekadan fiziksel zekaya geçiş süreci çoktan başlamış durumda.
Sonuç
Yapay zeka ekranların ve veri merkezlerinin sınırlarını aşmaya başlıyor.
Fiziksel Yapay Zeka, dijital zekayı somut gerçekliğe taşıyarak yeni nesil otonom sistemlerin ihtiyaç duyduğu algılama, muhakeme, planlama ve kontrol yeteneklerini sağlıyor. Sensörleri, dünya modellerini, simülasyonu, makine öğrenmesini ve robotiği bir araya getirerek makinelerin yalnızca bilgiyi anlamasını değil, aynı zamanda çevrelerindeki dünyayla anlamlı biçimde etkileşim kurmasını mümkün kılıyor.
Sohbet botları yapay zekanın bilgiyle neler yapabileceğini gösterdi. Fiziksel Yapay Zeka ise yapay zekanın gerçek dünyayla neler yapabileceğini göstermeye başlıyor.
Yazan: A. Tuter
Kullanım Koşulları: İçeriklerimizin her hakkı saklıdır, izinsiz olarak kopyalanamaz, yayınlanamaz. Paylaşımlarımızı tarihli olarak kaydetmekteyiz. İçeriklerimizde hata ve eksiklikler olabilir. Bahsi geçen ticari markalar sahiplerine aittir; bunlarla bağlantımız bulunmamaktadır ve bu içerik onay anlamı taşımaz. Kullanım koşulları sayfamızı ziyaret ediniz.
Fiziksel Yapay Zeka Nedir? Yapay Zeka Sohbet Botlarından Robotlara Nasıl Geçiyor? added by editor on
View all posts by editor →
Yorum yapabilmek için kayıtlı kullanıcı olmanız gerekmektedir. Giriş